Hey There!👋 I am Sushmitha Govindaraj, a results-driven Robotics Engineer currently
pursuing my
M.Sc. in Automation &
Robotics
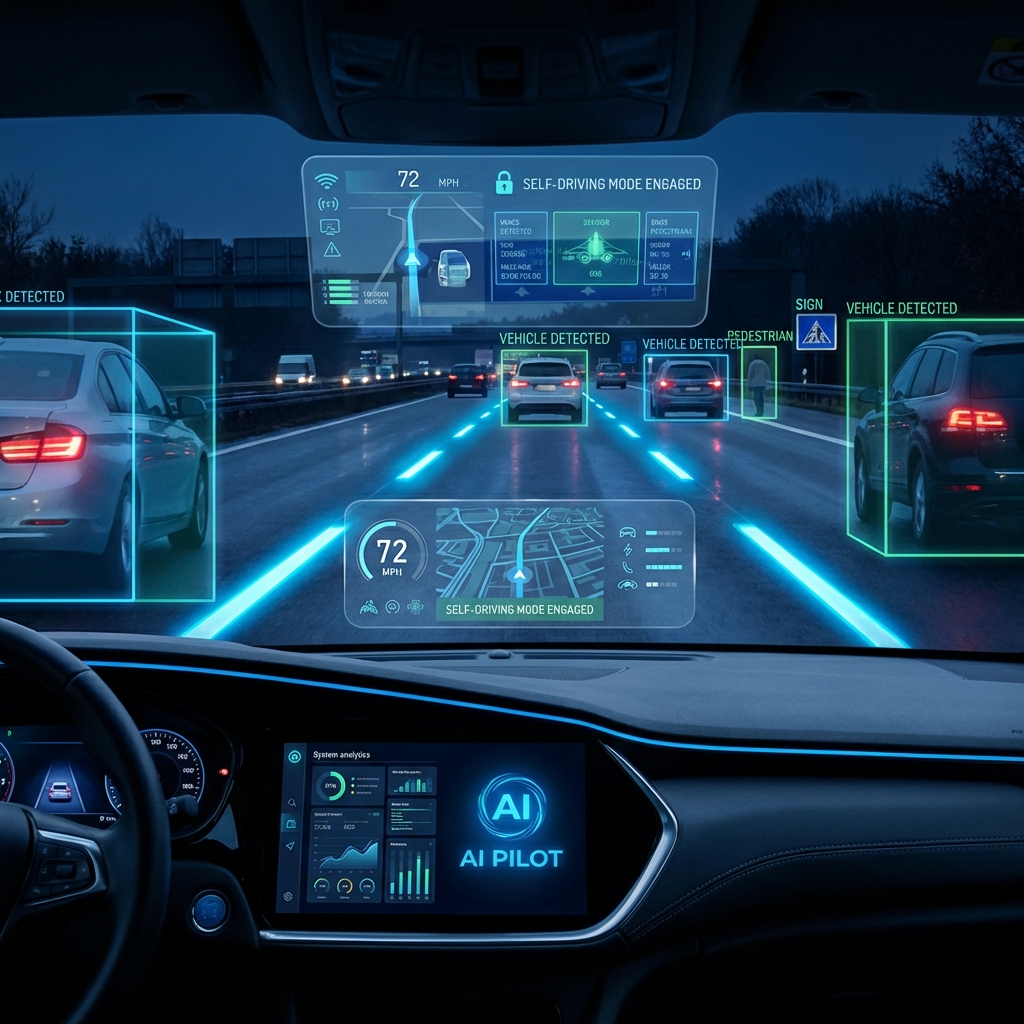
at TU Dortmund, Germany. With a strong foundation in AI-powered solutions, autonomous
systems,
and industrial automation, I specialize in developing intelligent systems using deep
learning,
robotic manipulation, and sensor data fusion.
While my primary focus remains on robotics, Currently at Wilo Group, I gain extensive
experience leveraging Databricks
and
PySpark for industrial data science solutions, bridging the gap between big data and
autonomous
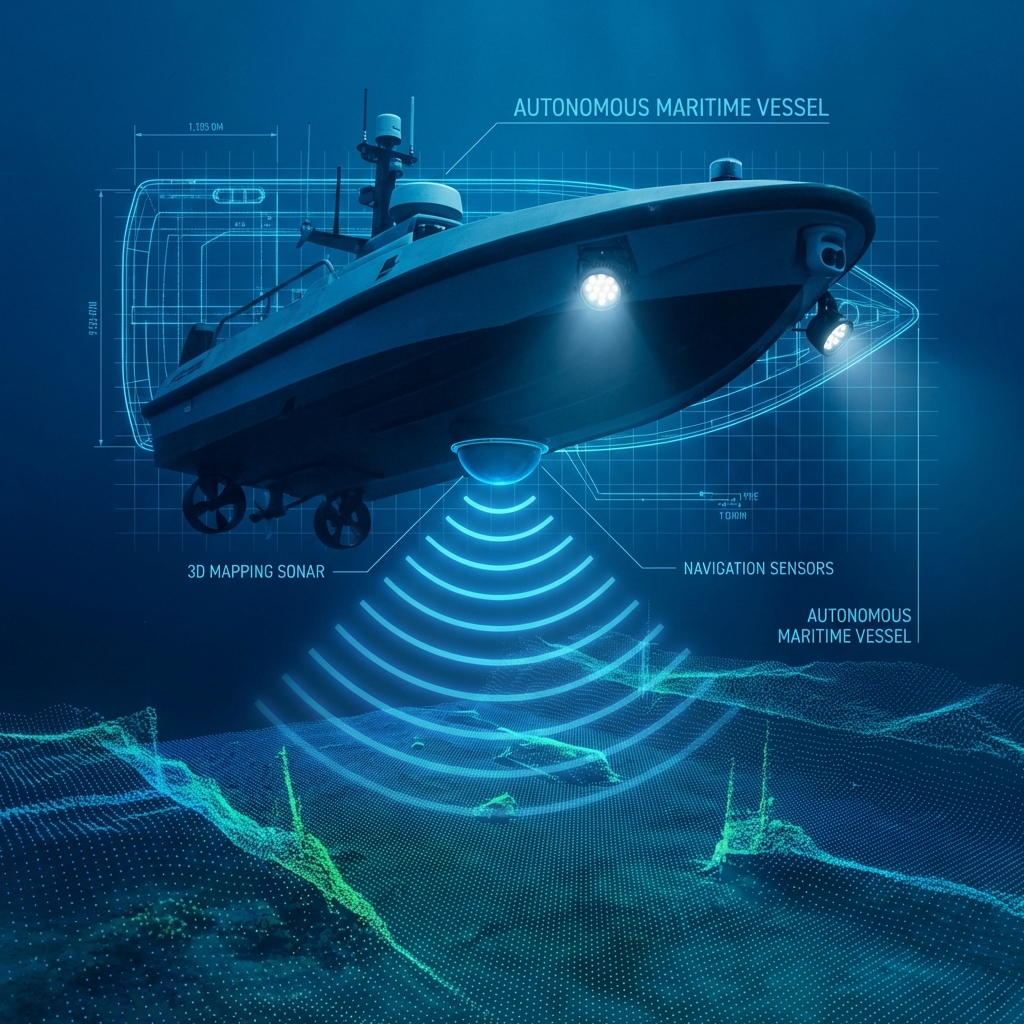
control. My experience spans from working on sonar-based SLAM for autonomous vessels to
optimizing signal processing in embedded systems through AI-driven modeling.
I thrive on solving complex challenges and creating innovative solutions that enhance
autonomy,
adaptability, and efficiency in robotics.